Microsoft Flight Simulator Handbook
by Jonathan M. Stern
Night ILS Approach
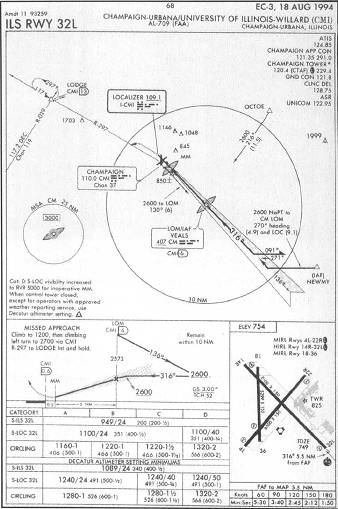
For the sake of proficiency and an opportunity to try a full ILS approach with a procedure turn, head to the PC flight simulation capital of the World, Champaign, Illinois (see Figure 18.60).
This is where it all began for Bruce Artwick and the Flight Simulator program. It is the home both of BAO, Inc., and subLOGIC Corporation.
To begin:
- Place your airplane at runway 32L at Champaign's Willard Airport. Use the World/Airports menu to select from the Chicago area database.
- For the night effect, set the airplane's clock to 2200 hours.
- Program an overcast layer of clouds from 1,000 feet up to 1,500 feet.
- To set up for the approach, tune the ADF to 407, the frequency for VEALS. Tune the NAV 1 radio to the localizer frequency, 109.1. Rotate the OBS until the OBI reads 316°, the inbound course.
- Now, take off and fly directly to VEALS LOM while climbing to the initial approach altitude of 2,600 feet. As you enter the overcast, it may be necessary to turn off the airplane's strobe lights, which reflect off the inside of the clouds and into the cockpit. The flashing may interfere with normal night vision and may contribute to disorientation. VEALS is displayed as an IAF for the ILS Rwy 32 IAP. You are flying outbound along the localizer course (with reverse sensing) and making a procedure turn to get turned around.
- At VEALS, you should get the outer marker light and dash-dash-dash aural code. Moreover, the localizer CDI should center, perhaps momentarily if you're cutting across the localizer course.
- Upon station passage, turn to a heading of 136°; then use VOR intercept procedures (with much smaller intercept angles) to get on the localizer course heading outbound.
Remember, however, that you have reverse sensing and that you must make corrections away from, rather than toward, the needle. You should fly outbound for about two minutes after passing VEALS.
- After two minutes have passed, turn left to a heading of 91° and time for one minute. During the one minute, slow the airplane to approach speed.
- Turn right to a heading of 271 degrees. As the needle moves to the center of the NAV 1 display, turn to the final approach course heading of 316° and track the localizer inbound. The ADF can be a helpful tool here, because it shows a 45° relative bearing when the aircraft is reintercepting the localizer. Therefore, as the relative bearing approaches 45°, you can predict the movement of the localizer CDI and pace the turn back onto the final approach course.
- As the glideslope needle enters the bullseye, lower the landing gear and pitch for a descent rate suggested by the Rate of Descent Table (see Figure 18.62).
- Perform the Before Landing checklist. If you want a short break, you may want to use the Approach setting of the autopilot to fly the approach, both localizer and glideslope, all the way to the middle marker. Then, you have only to control airspeed with the throttle and continue scanning to ensure that the autopilot is doing what you expect. According to the Table, a 480 foot per minute descent rate should maintain the glideslope at a 90 knot groundspeed.
As you pass the LOM, the outer marker indicator will sound and light, the ADF needle will turn toward the 180° position, and the altimeter should pass through 2,573 feet, the glideslope altitude at the outer marker.
- At decision height, decide whether you can continue the approach and land or whether you must execute the MAP (see Figure 18.63).
- If you used the autopilot for the IAP, be sure to disengage it no later than at decision height. The autopilot is unreliable inside the middle marker when flying an ILS approach.

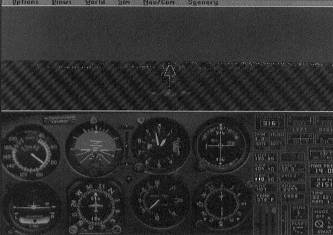
Table of Contents
Previous Section: Daylight ILS Approach
Next Section: ILS Approach with Component Failures